|
|

|

|
| e-Pub |
Section: New Results
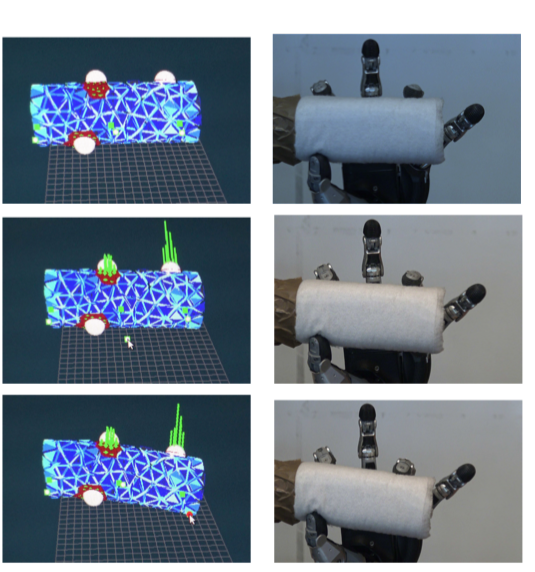
FEM-based Deformation Control for Dexterous Manipulation of 3D Soft Objects
In this project, that was organize through a collaboration with Fanny Ficuciello from University of Naples and Antoine Petit from Mimesis team in Strasbourg we developed a method for dexterous manipulation of 3D soft objects for real-time deformation control, relying on Finite Element modelling. The goal is to generate proper forces on the fingertips of an anthropomorphic device during in-hand manipulation to produce desired displacements of selected control points on the object. The desired motions of the fingers are computed in real-time as an inverse solution of a Finite Element Method (FEM), the forces applied by the fingertips at the contact points being modelled by Lagrange multipliers. The elasticity parameters of the model are preliminarily estimated using a vision system and a force sensor. Experimental results were shown with an underactuated anthropomorphic hand that performs a manipulation task on a soft cylindrical object.